Tanks A Lot!
The source code for this example is here.
Artificial neural networks are not the answer to everything. Working with them requires care and attention, and sometimes a hard coded solution is an easier way to the same result!
This example project, where neural networks control virtual and real-world "tank bots" demonstrates these limitations.
And now for something completely different...
These complexities are beautifully illustrated by an urban myth about Regan era research into the use of neural networks to help tank crews identify friend or foe in the fog of war of a tank battle.
It goes something like this...
Millions of dollars were spent training a neural network on images of Soviet and American tanks so, in theory, the artificial neural network would be able to quickly classify the vehicle as friend or foe. After training, the artificial neural network was checked against the unseen test data from the same corpus of photographs. It passed with flying colours!
The next step involved testing with actual hardware on a simulated battlefield.
That's when things went wrong.
The artificial neural network was mis-categorising friends as foes (and vice versa), and demonstrating eccentric yet dangerous behaviour, like identifying a tree or the local wildlife as an enemy. Millions of dollars later engineers realised the problem was both simple and stupid.
In the photographic corpus, all the Soviet tanks had been photographed in the sunshine, whereas all the American tanks had be photographed on an overcast and cloudy day.
Inadvertently, the neural network had been trained to categorise the weather (or more specifically, the light conditions).
Soon after came the AI winter - where the over-promised capabilities of AI were called out and funding dried up.
Bots with Brains
This example makes use of "tank bots" that trundle around the world. They have two motors to drive forwards, and turning is made possible by changing the speed of rotation of the motors so one is faster than the other (just like how tanks steer - hence the name). The bots all have a single sensor at the front, to tell their distance from obstacles ahead.
In this example three types of bot were created:
- A simple "stupid" bot, with hard coded rules to tell the bot to rotate one direction or another if something was detected ahead.
- Two bots controlled by neural networks:
- One trained on labelled data that defined the behaviour of the hard coded rules in the "dumb" bot.
- The other evolved from "living" in a virtual world containing obstacles and other bots.
All the core bot related code is in the bot.py file in this example.
These "bots" were placed into a virtual world to see how they would behave. Here's how it looks:

See these bots running live in your browser.
The "stupid" bot's hard-coded instructions were:
def drive(self):
"""
Very stupid hard coded rules for driving the bot.
"""
# Close obstacle - turn around.
if (self.distance_reading > 0):
if self.rotate_direction is None:
# Select a random direction in which to rotate.
self.rotate_direction = random.choice([
(0.0, 1.0), # Rotate left.
(1.0, 0.0) # Rotate right.
])
self.set_motors(*self.rotate_direction)
else: # No obstacle detected or far away - move forward.
self.rotate_direction = None # Reset rotation direction.
self.set_motors(0.5, 0.5) # Gently move forward.
Each neural network has an input layer of six nodes: one to indicate no obstacle detected, with the other five used to indicate how close a detected obstacle is. The output layer is simply two nodes, whose output values control the speed of the left and right motors. Twelve nodes make up the hidden layer in these networks. How did I arrive at twelve nodes in the hidden layer? Trial and error and intuition.
It took but five minutes to code the instructions for the "stupid" bot. It took several evenings and a weekend of work to create the virtual world in which the neural networks could be tested.
Furthermore, the initial versions of the labelled data for supervised learning, and the fitness function for the neuro-evolution required significant amounts of "tweaking" based upon observations and intuitive fiddling about.
For instance, the bot trained with labelled data wasn't (at first) sensitive enough to distance, nor did it turn fast enough. So it ended up constantly driving into walls.
The neuro-evolved bot was rather entertaining. At first the fitness function was mostly based on the bot's lifespan (i.e. it didn't crash). But this resulted in a rotating bot that went nowhere and behaved like this:

Further iteration of the fitness function involved part of the score being derived from the number of times the bot moved position. Alas, evolution got the better of me again:

In the end, the fitness function's score is derived from all sorts of subtle and not-so-obvious factors that affect how a bot behaves. It took a number of attempts to get the training of both supervised and unsupervised networks correct so vaguely desirable results were obtained.
To be honest, at times this felt deeply frustrating and more like trial and error than engineering.
You can see the eventual outcome in the train.py and labelled_data.json
files in this project.
Bots encounter the real world...
Out of a sense of fun, I decided to build an actual bot with two motors and a distance sensor made with parts from the excellent Lego SpikePrime kit.
Here's what it looked like, so you can recreate the bot should you have access to the necessary Lego kit:
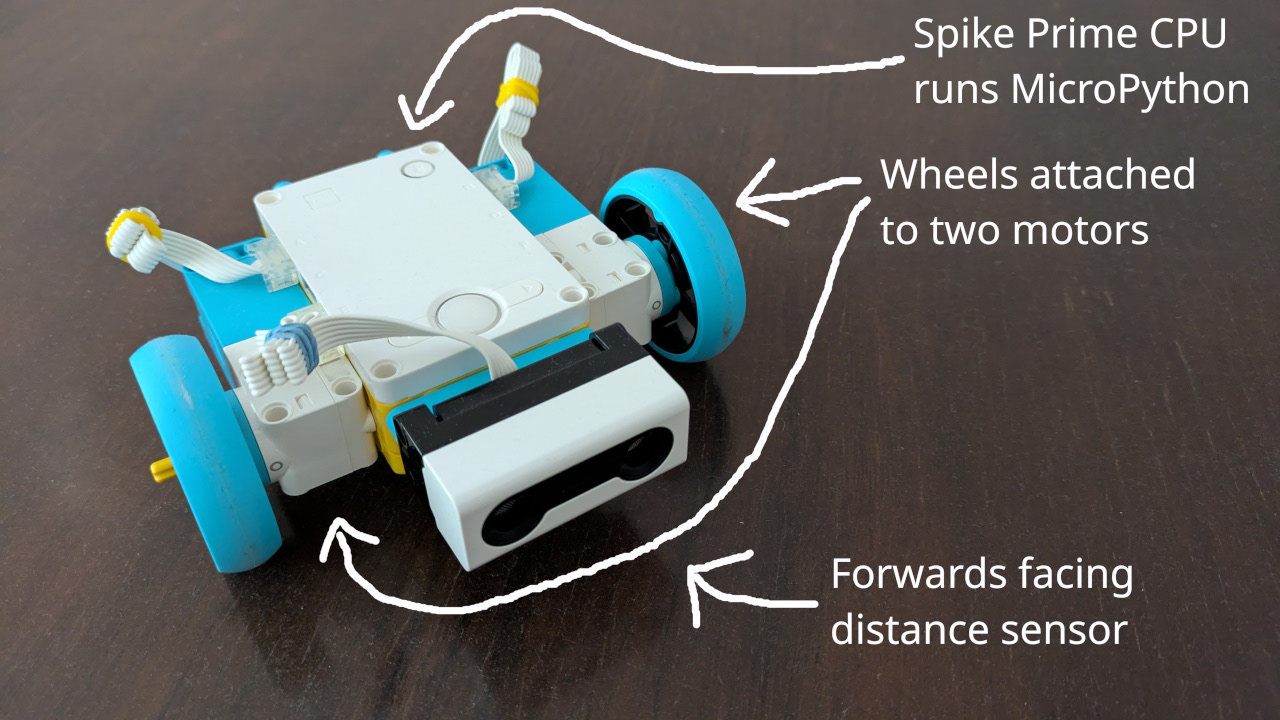
Alternatively, it's quite easy to make an equivalent bot with non-Lego parts and a microcontroller running MicroPython (such as an ESP32).
The code used to control the Lego bot is found in the spike_code.py file
in this example. As you'll see I've extracted only those functions required
from SANN to evaluate the neural network. I updated the code so it ran
without a neural network (as "stupid" bot), and with the two neural networks
trained and evolved in the virtual world. In a sense, I performed a brain
transplant from the virtual world to the real world.
If you use a non-Lego bot, you'll need to update the code for interacting with the motors and distance sensor.
I used various instrument cases in my music room to act as obstacles in the real world, and let the different versions of the bot loose. I think the results speak for themselves (and are best accompanied by music):
Your challenge
Apart from the creation of a 2d virtual world in which to run and train the bots, this example was created relatively quickly. The real-world Lego based bot could definitely be refined and I strongly suspect the quality and behaviour of the sensor had a lot to do with the end result. Furthermore, I believe this example demonstrates just how difficult it is to create a useful neural network that has to interact with the real world in any way. The cost of training, time taken to refine the quality of the training data or fitness function, and the fact that the "stupid" bot appears to perform just as well helps to show that neural networks come with costs.
So, your challenge is to use SANN to improve on my shonky results. Get in touch and tell me how you get on. Who knows, your work could be a new example in these docs!
Best of luck!